



機(jī)械臂項(xiàng)目:一步一步指南
- 發(fā)表時(shí)間:2021-11-02 08:30:44
- 來(lái)源:本站
- 人氣:843
您正在與需要高度精確性的任務(wù)作斗爭(zhēng)嗎?或者您是處理需要高精度和性能的一致和重復(fù)的操作?然后,你需要一個(gè)機(jī)械臂項(xiàng)目。
此外,它是一種可靠的電子多氯聯(lián)苯設(shè)備,可以執(zhí)行廣泛的操作。因此,你會(huì)發(fā)現(xiàn)機(jī)器人手臂在不同的行業(yè),如:
機(jī)器訪問(wèn)
實(shí)驗(yàn)室
工業(yè)自動(dòng)化
制造業(yè)
因此,這將是一個(gè)絕妙的主意,采取機(jī)械臂項(xiàng)目。毫無(wú)疑問(wèn),一開(kāi)始看起來(lái)很復(fù)雜,但是,隨著所有材料的到位,任務(wù)將更加簡(jiǎn)單。在本文中,我們將向您提供如何構(gòu)建機(jī)械臂的詳細(xì)信息。
我們開(kāi)始工作吧!
什么是機(jī)械臂?
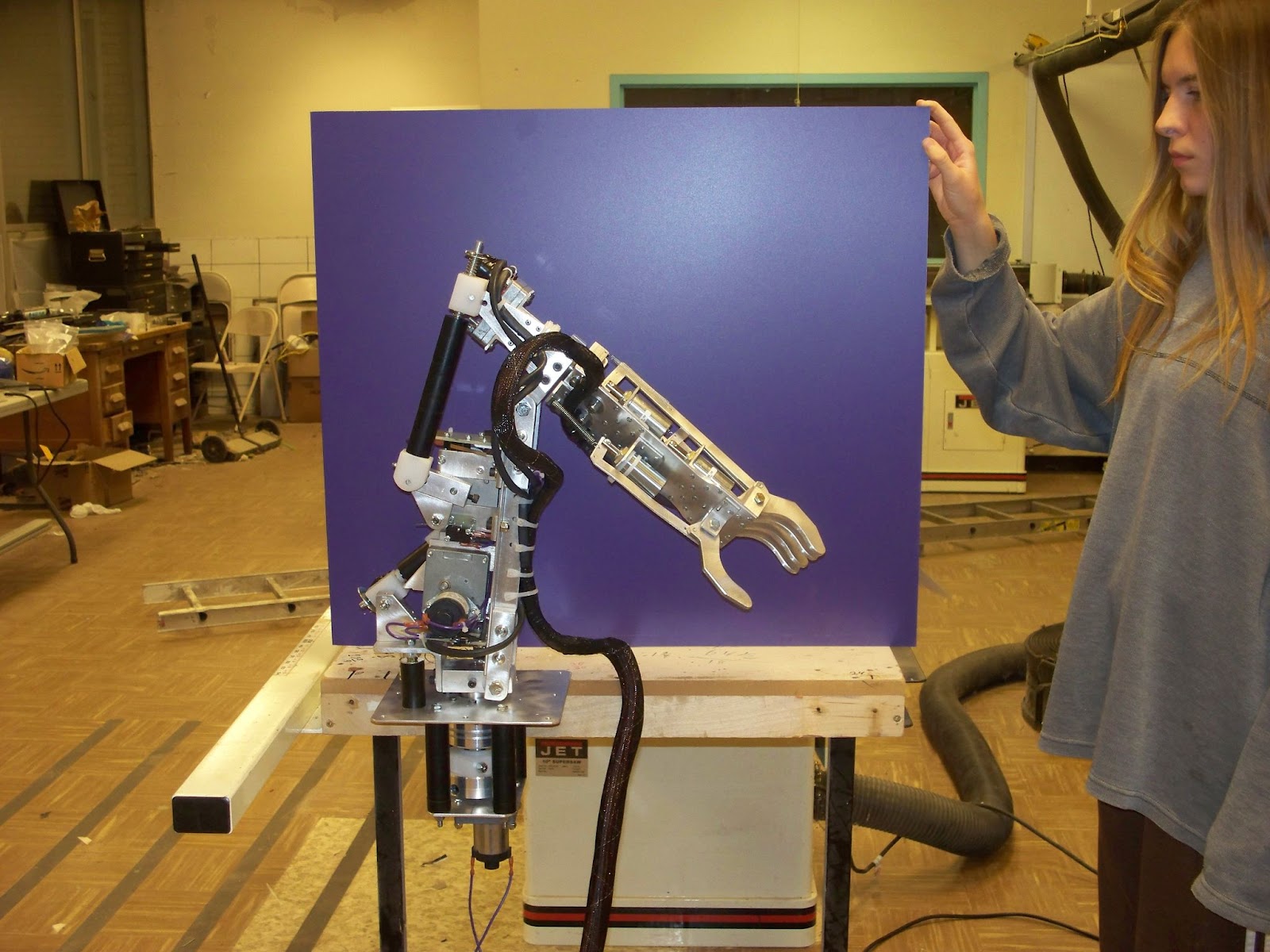
工業(yè)機(jī)械臂
機(jī)械臂是指一種機(jī)械工具,您可以通過(guò)特殊軟件自動(dòng)實(shí)現(xiàn)自動(dòng)化。你可以在特定的微控制器上安裝特殊的軟件。大多數(shù)時(shí)候,這種設(shè)備可以是類似人類的機(jī)器人的一部分,也可以是一個(gè)獨(dú)立的設(shè)備。
此外,它執(zhí)行的任務(wù)類型取決于手臂關(guān)節(jié)的運(yùn)動(dòng)。例如,你可以看到一個(gè)機(jī)械臂和機(jī)械抓地力臂與單獨(dú)的關(guān)節(jié),可以向直向移動(dòng)。
如何制作簡(jiǎn)單的機(jī)械臂?
我們將向您展示如何制作一個(gè)簡(jiǎn)單的機(jī)械臂,記住動(dòng)作和游戲的順序。這就是說(shuō),讓我們來(lái)看看你需要的項(xiàng)目組件:
面包板
面包板
木塊
安裝阿杜伊諾 IDE
伺服電機(jī) (5)
一組伺服電機(jī)
阿爾杜伊諾·烏諾
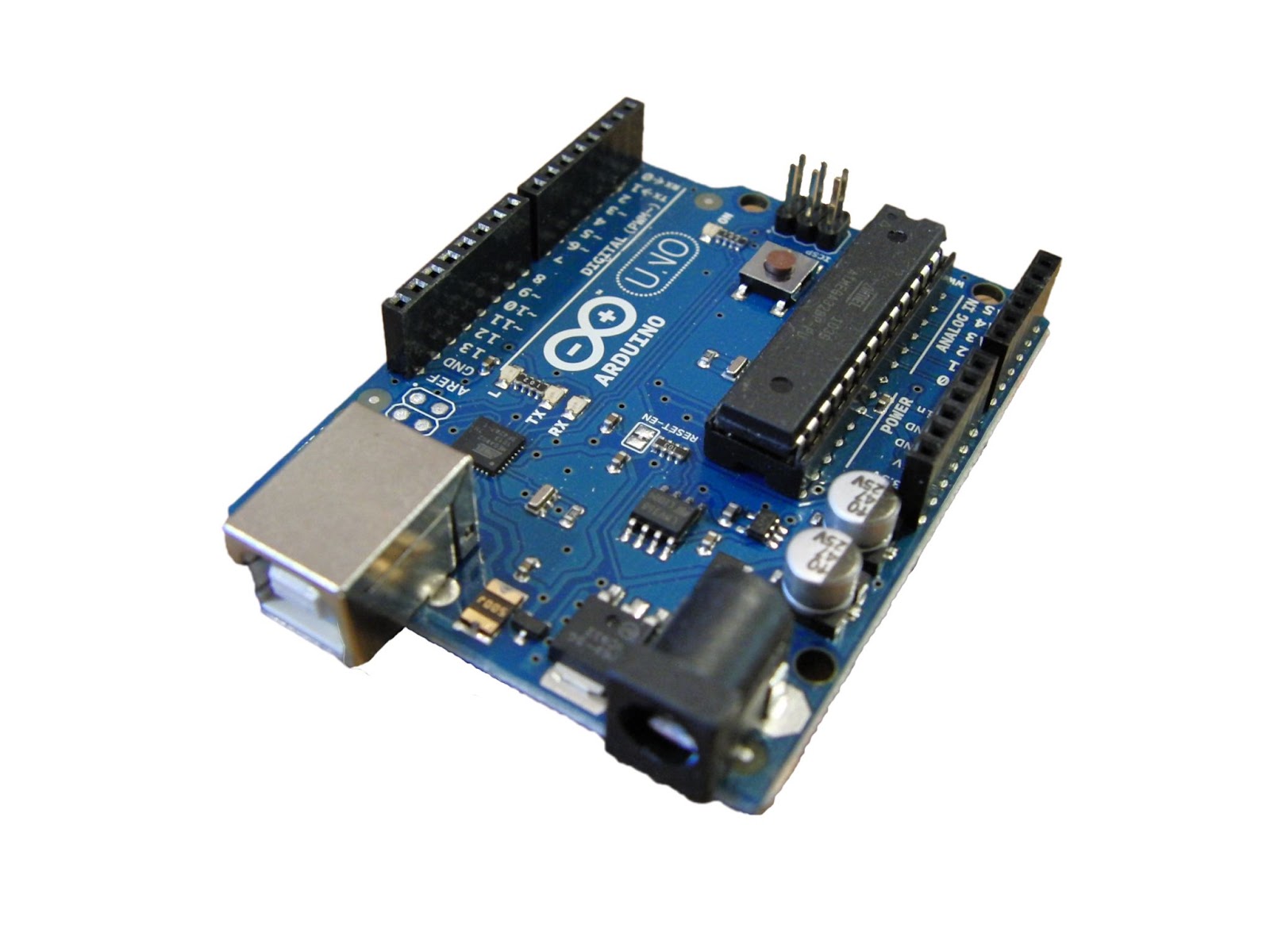
阿爾杜伊諾·烏諾
資料來(lái)源:維基共享資源
波坦蒂米(5)
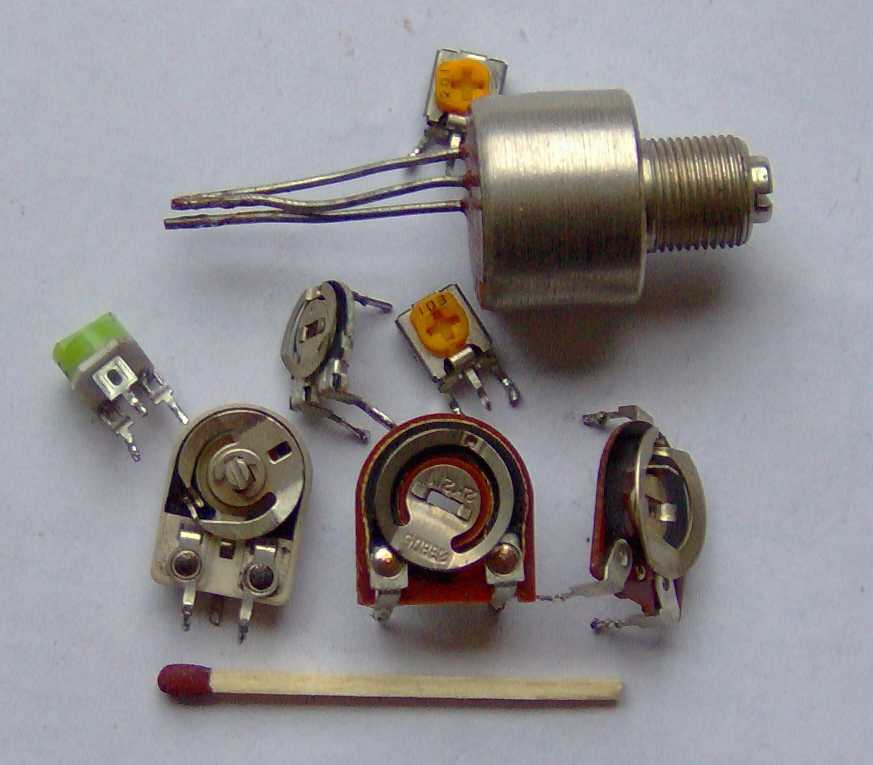
一組波坦蒂米
資料來(lái)源:維基共享資源
適配器 (5V 2A)
畫(huà)布板(A4 尺寸)
信號(hào)線

信號(hào)線
考慮到這一點(diǎn),您可以在以下步驟中著手構(gòu)建您簡(jiǎn)單的機(jī)械臂項(xiàng)目:
工作機(jī)器人手臂
第 1 步 - 開(kāi)始將碎片放在一起

與強(qiáng)力計(jì)相連的冰棒木塊
資料來(lái)源:可指導(dǎo)
第一步是得到一小塊穩(wěn)定的木頭來(lái)創(chuàng)造手臂。當(dāng)你在,選擇任何你喜歡的機(jī)械設(shè)計(jì)。然后,用膠帶(雙面)將伺服膠粘在木頭上。之后,用螺絲把伺服器扣在木頭上。
至于主臂,你可以通過(guò)在小木頭上安裝你的強(qiáng)力計(jì)來(lái)達(dá)到這個(gè)目標(biāo)。您可以使用帆布板作為基礎(chǔ)來(lái)安裝設(shè)置。
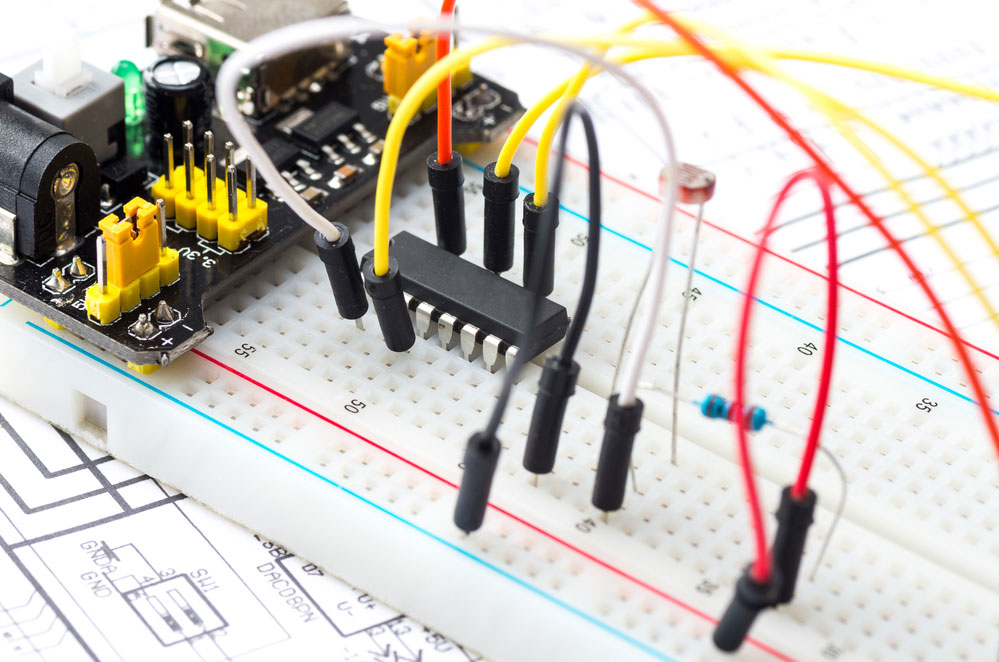
第 2 步 - 連接電線
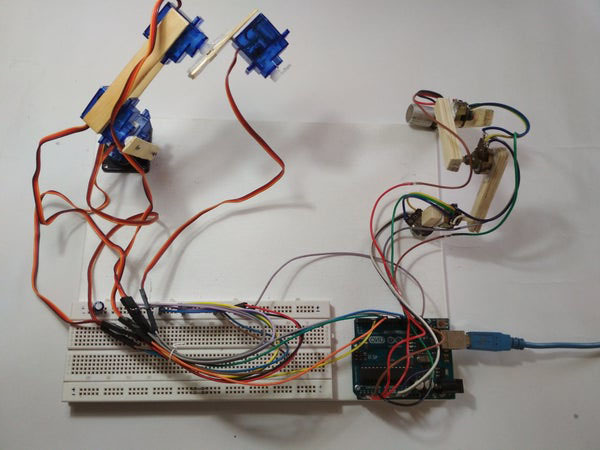
連接面包板上的電線和木塊
資料來(lái)源:可指導(dǎo)
這里的目標(biāo)是確保正確連接所有電線。第一步是得到你所有的伺服。然后,將伺服服務(wù)器與電源進(jìn)行平行連接。即,當(dāng)紅線連接到正線時(shí),您的黑線應(yīng)轉(zhuǎn)到 Gnd。
一旦你有,得到你的信號(hào)線(橙色或黃色),并把它連接到阿杜伊諾的PWM針。有了這個(gè),你可以繼續(xù)連接阿杜伊諾的Gnd并行。此外,您還需要將您的強(qiáng)力計(jì)連接到 +5V。
之后,將您的中間終端連接到阿杜伊諾模擬引腳。這就是說(shuō),你可以用數(shù)字引腳來(lái)調(diào)節(jié)伺服器,如10、9、6、5和3。此外,您可以使用 A0 到 A4(模擬引腳)從強(qiáng)力計(jì)輸入。
此外,連接到 A0 的強(qiáng)力計(jì)有助于調(diào)節(jié)附著在引腳 3 上的伺服。此外,A1 上的鍋控制連接到引腳 5 的伺服。
毫無(wú)疑問(wèn), 阿杜伊諾不為伺服者供電。但是,確保正確連接阿杜伊諾和 GND 以使手臂工作至關(guān)重要。
步驟 3 - 代碼的時(shí)間
這個(gè)項(xiàng)目的編碼過(guò)程非常簡(jiǎn)單。因此,您可以首先將強(qiáng)力計(jì)存儲(chǔ)在陣列中。當(dāng)您獲得記錄時(shí),繼續(xù)用"循環(huán)"來(lái)橫向轉(zhuǎn)。這樣,伺服員將處理步驟。
換句話說(shuō),您可以通過(guò)說(shuō)明全球所有重要變量來(lái)啟動(dòng)該過(guò)程。有了這個(gè),就更容易理解和使用整個(gè)程序中的變量。
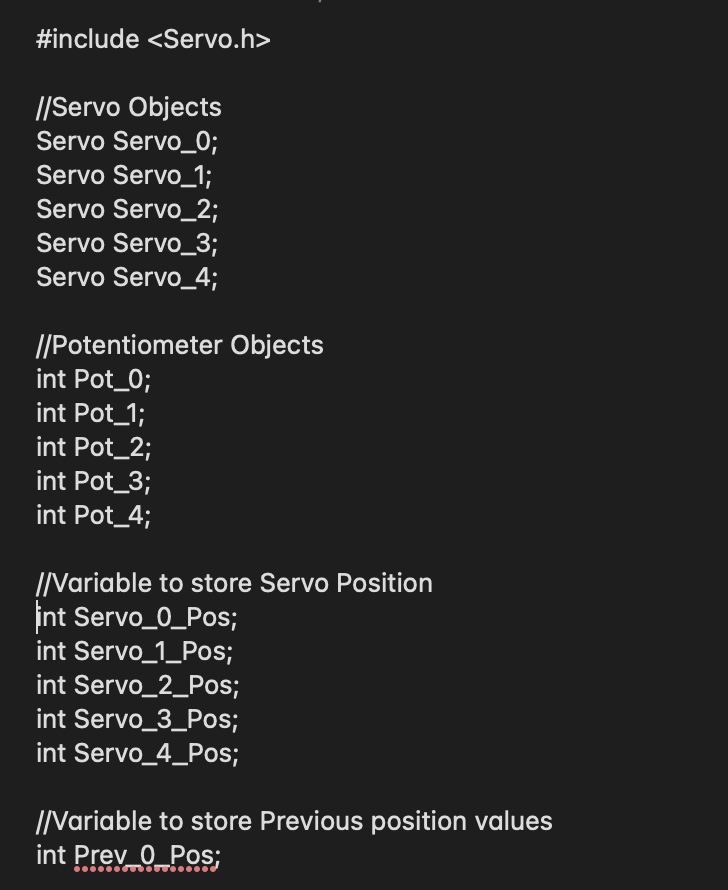
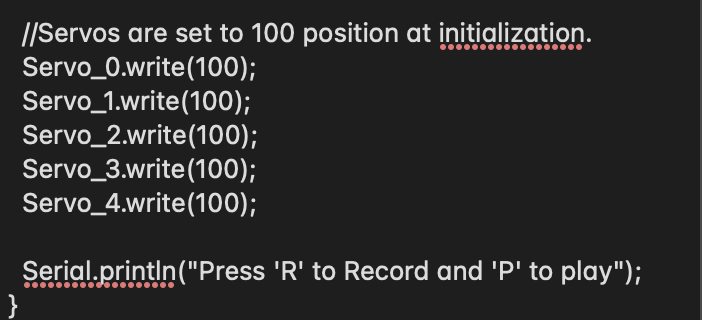
之后,繼續(xù)執(zhí)行啟動(dòng)第一次執(zhí)行的主要功能。因此,您將提出一個(gè)設(shè)置功能,將突出顯示設(shè)置的引腳及其功能。
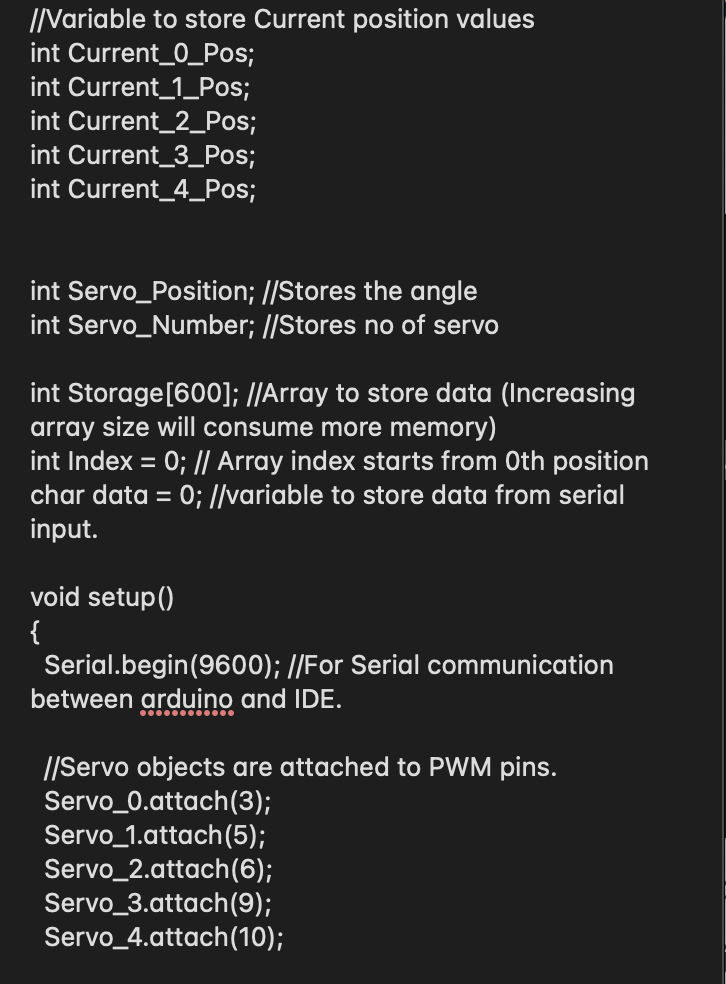
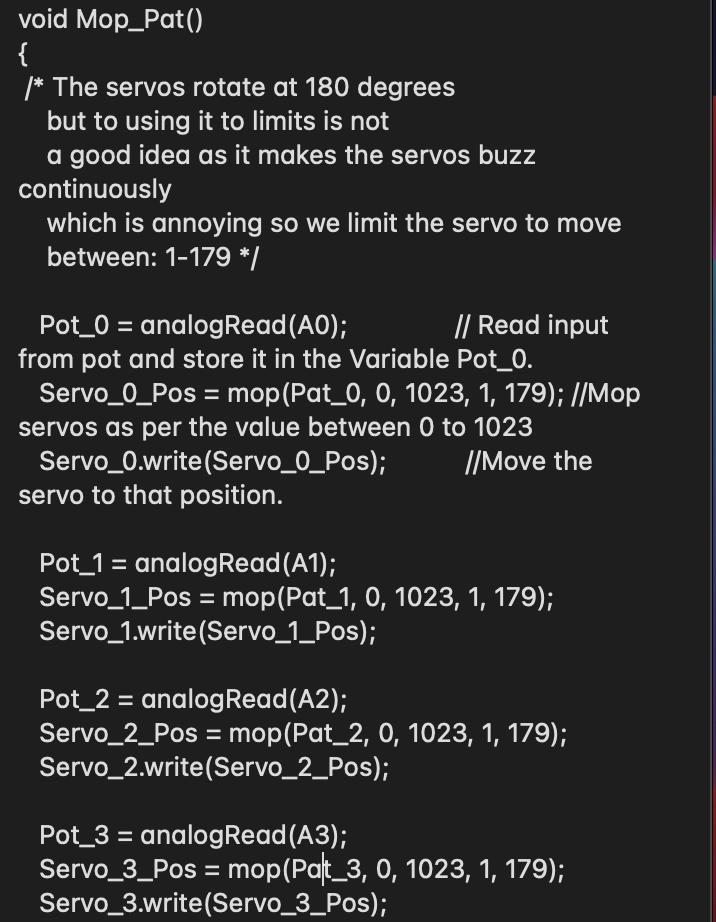
當(dāng)您擁有該點(diǎn)時(shí),下一個(gè)任務(wù)是使用模擬輸入引腳來(lái)獲取強(qiáng)力計(jì)的值。此外,模擬輸入引腳有助于繪制有助于調(diào)節(jié)伺服物的值圖。
現(xiàn)在,是時(shí)候命名用戶定義的功能了。在下面的代碼中,我們選擇了Mop_Pat;
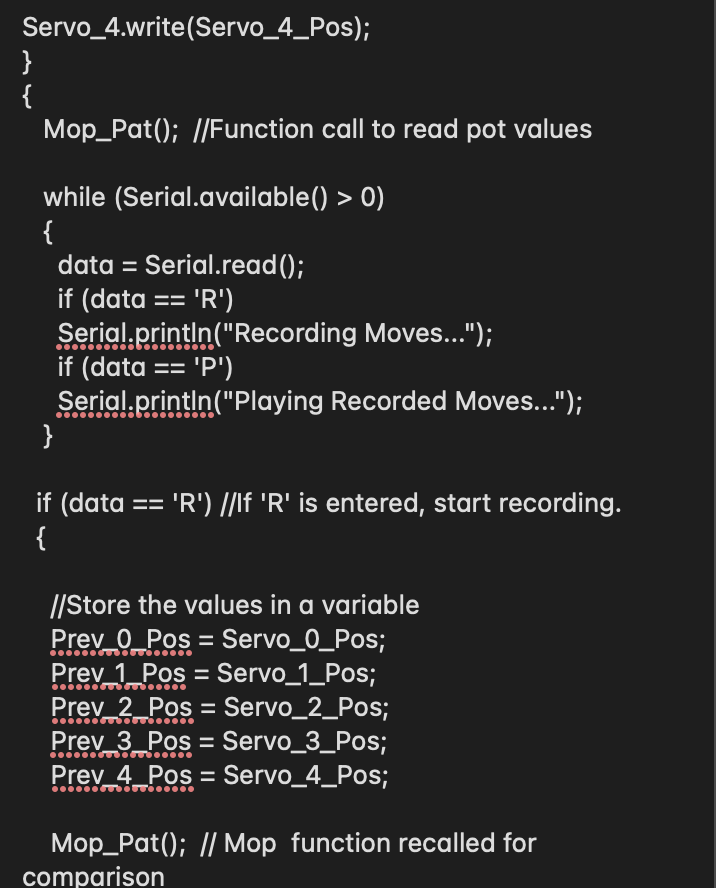
有了這個(gè),你可以放下循環(huán)功能。完成代碼后,您可以將其傳輸?shù)?Arduino 板。
有了這個(gè),你的機(jī)械臂就會(huì)起作用。此外,您可以在必要時(shí)對(duì)代碼進(jìn)行一些調(diào)整,以便操作更順暢。
步驟 4 - 測(cè)試離開(kāi)
完成將代碼傳輸?shù)桨搴螅D(zhuǎn)到工具選項(xiàng)。在此選項(xiàng)中,請(qǐng)?jiān)L問(wèn)"串行監(jiān)視器"。單擊此功能時(shí),它將幫助您重置 Arduino。它允許您使用主臂輕松控制機(jī)械臂。但是,此時(shí)無(wú)法記錄任何移動(dòng)。
因此,您必須在監(jiān)視器上鍵入"R"才能記錄所有移動(dòng)。當(dāng)您記錄了所有動(dòng)作后,鍵入"P"。此功能有助于重播所有動(dòng)作。最好的部分是,只要您不重置板,伺服人員將繼續(xù)執(zhí)行這些動(dòng)作。
其他阿杜伊諾機(jī)器人手臂項(xiàng)目創(chuàng)意
如果您覺(jué)得上面的項(xiàng)目過(guò)于基本,請(qǐng)隨時(shí)嘗試其他 Arduino 手臂機(jī)器人項(xiàng)目的想法,如:
帶手勢(shì)控制的機(jī)械臂(阿杜伊諾 + 基尼特)
手勢(shì)控制機(jī)械臂
資料來(lái)源:維基共享資源
這個(gè)項(xiàng)目涉及用手勢(shì)指揮機(jī)械臂。您可以用 Kinect 傳感器捕捉手勢(shì)。因此,工程師們開(kāi)發(fā)了機(jī)械臂來(lái)模仿肘部、右臂、手部和肘部的運(yùn)動(dòng)。此外,他們還創(chuàng)建了此工具與伺服電機(jī)。
網(wǎng)絡(luò)控制機(jī)器人手臂

網(wǎng)絡(luò)控制機(jī)器人臂
網(wǎng)絡(luò)控制的機(jī)器人手臂是另一個(gè)了不起的發(fā)明。該工具向您展示了與網(wǎng)絡(luò)服務(wù)器協(xié)調(diào)手臂機(jī)器人的可能性。有趣的是,外部源為此設(shè)備供電,并且它使用大約六個(gè)伺服電機(jī)。
因此,要做到這一點(diǎn),你必須研究它的工作流程,注意源代碼,并了解系統(tǒng)架構(gòu)。
農(nóng)丘克控制阿爾杜伊諾機(jī)械臂
這個(gè)項(xiàng)目的想法以其獨(dú)特性而引人注目。通過(guò)此項(xiàng)目,您將學(xué)習(xí)如何使用 Arduino Mega 對(duì)設(shè)備進(jìn)行編程并有效地安裝手臂機(jī)器人。此外,您可以使用任天堂Nunchuk來(lái)控制此工具。
最好的部分是,農(nóng)丘克有很多傳感器。此外,它隨時(shí)可用,價(jià)格便宜。所以,如果你想建立這個(gè)機(jī)器人手臂,這是至關(guān)重要的,以獲得你需要的工具和代碼的列表。
安卓應(yīng)用程序控制阿杜伊諾機(jī)器人手臂

生產(chǎn)線上的機(jī)械臂
這個(gè)機(jī)械臂是另一個(gè)任務(wù)項(xiàng)目,你可以選擇。該設(shè)備通過(guò)安卓應(yīng)用程序在 Arduino 旁邊使用藍(lán)牙模塊。這就是說(shuō),一些工具,你需要建立這個(gè)機(jī)械臂包括一個(gè)通用電機(jī),有一個(gè)藍(lán)牙模塊(HC-05)和一個(gè)阿杜伊諾巨型2560。
無(wú)線控制機(jī)器人手
如果您想知道構(gòu)建機(jī)器人手需要什么,選擇此項(xiàng)目是理想的選擇。此外,它還教您如何控制此工具。此外,您還需要相關(guān)傳感器、電池、Arduino 板和伺服電機(jī)等工具,以便使用無(wú)線手套構(gòu)建此機(jī)器人手。
阿杜伊諾調(diào)酒師機(jī)器人手臂

阿杜伊諾調(diào)酒師機(jī)器人手臂
資料來(lái)源:世界建筑
調(diào)酒師機(jī)器人手臂是跳上的項(xiàng)目,如果你正在尋找一個(gè)有趣的項(xiàng)目,將打動(dòng)客人。這個(gè)工具通常有一個(gè)機(jī)器人吉克捕捉器手臂。 此外, 它有一個(gè)閥門(mén)噴油器, 以提高它的調(diào)酒功能。因此,這個(gè)項(xiàng)目將很好地將飲料從容器中轉(zhuǎn)移到您的玻璃杯中。
計(jì)算機(jī)鼠標(biāo)控制阿杜伊諾機(jī)械臂
這個(gè)項(xiàng)目是理想的,如果你喜歡一個(gè)阿杜伊諾手臂項(xiàng)目,你可以控制你的電腦鼠標(biāo)。最好的部分是,這個(gè)阿杜伊諾機(jī)械臂可以通過(guò)處理圖片作出決定。如何?該工具在 Matlab 視覺(jué)軟件的幫助下進(jìn)行。
最后一句話
機(jī)械臂項(xiàng)目正在迅速成為世界上的一個(gè)東西。看到這些設(shè)備攜帶物品,根據(jù)類型精確平衡和堆疊物品,令人滿意。它們有助于醫(yī)療應(yīng)用和太空探索。

工廠中的機(jī)器人手臂
因此,這是一個(gè)極好的時(shí)間來(lái)建立這個(gè)工具的廉價(jià)版本 -特別是如果你不想處理任何重復(fù)的任務(wù)。你需要幫助開(kāi)始嗎?隨時(shí)聯(lián)系我們.
- 2025-02-20深圳SMT貼片加工如何計(jì)算報(bào)價(jià)?
- 2026-03-03跨境電商賣(mài)家做PCBA代工代料,如何避免知識(shí)產(chǎn)權(quán)與出口管制風(fēng)險(xiǎn)?
- 2026-02-26元器件采購(gòu)成本居高不下,PCBA代工代料如何幫客戶優(yōu)化BOM總成本?
- 2026-02-05貼片機(jī)吸嘴日常保養(yǎng):多久清洗一次?磨損到什么程度必須更換?
- 2026-02-04AOI的基本原理與設(shè)備構(gòu)成是什么?
- 2026-02-02針對(duì)高速信號(hào)板,SMT加工中如何控制阻抗連續(xù)性及減少串?dāng)_?
- 2026-01-30錫膏在鋼網(wǎng)上連續(xù)印刷多久需要回收添加新錫膏?有何注意事項(xiàng)?
- 2026-01-29怎么判斷自己焊接的電路板能不能正常使用?
- 2026-01-28智能穿戴產(chǎn)品PCBA一站式服務(wù):從柔性板(FPC)采購(gòu)到整機(jī)裝配的流程與成本
- 2026-01-27線路板加工廠必修課:從BGA封裝看SMT工藝差距

- 1深圳SMT貼片加工如何計(jì)算報(bào)價(jià)?
- 2跨境電商賣(mài)家做PCBA代工代料,如何避免知識(shí)產(chǎn)權(quán)與出口管制風(fēng)險(xiǎn)?
- 3元器件采購(gòu)成本居高不下,PCBA代工代料如何幫客戶優(yōu)化BOM總成本?
- 4貼片機(jī)吸嘴日常保養(yǎng):多久清洗一次?磨損到什么程度必須更換?
- 5AOI的基本原理與設(shè)備構(gòu)成是什么?
- 6針對(duì)高速信號(hào)板,SMT加工中如何控制阻抗連續(xù)性及減少串?dāng)_?
- 7錫膏在鋼網(wǎng)上連續(xù)印刷多久需要回收添加新錫膏?有何注意事項(xiàng)?
- 8怎么判斷自己焊接的電路板能不能正常使用?
- 9智能穿戴產(chǎn)品PCBA一站式服務(wù):從柔性板(FPC)采購(gòu)到整機(jī)裝配的流程與成本
- 10線路板加工廠必修課:從BGA封裝看SMT工藝差距